


LEAP Hand 対応
デザイン:カーネギーメロン大学
カーネギーメロン大学が開発したLEAP Handは、高性能な操作タスクのために構築された器用で擬人化されたロボットハンドです。独自の運動学構造により、幅広い指の姿勢において一貫した器用さを維持でき、複雑なハンドリング用途に適しています。
XELA Roboticsは、このLEAP Handに368個の触覚センサーを統合し、ハンド全体にわたる高解像度の接触フィードバックを提供しています。これにより、過酷な環境下での精密な制御、優れた適応性、高い信頼性を実現します。
高度なロボット操作に必要な詳細な接触認識を、現場で使いやすい形で実現するソリューションです。
センサータイプ:uSkin Patch
製品コード:uSPa 44
センサーモジュール数:11
モジュールあたりのタクセル数:16
合計:176
センサータイプ:uSkin Patch
製品コード:uSPa 46
センサーモジュール数:3
モジュールあたりのタクセル数:24
合計:72
センサータイプ:uSkin Curved
製品コード:uSCu ALHA
センサーモジュール数:4
モジュールあたりのタクセル数:30
合計:120
合計:
368個の3軸触覚センサー
概要:
指先ごとに30個
指節ごとに16個
親指に62個
各指(親指除く)に78個
各掌に72個



センサーはuAiソフトウェアと直接接続し、可視化・校正・補正を実現。用途を問わず、一貫性のある触覚データを提供します。
コンパクトなセンシングポイント



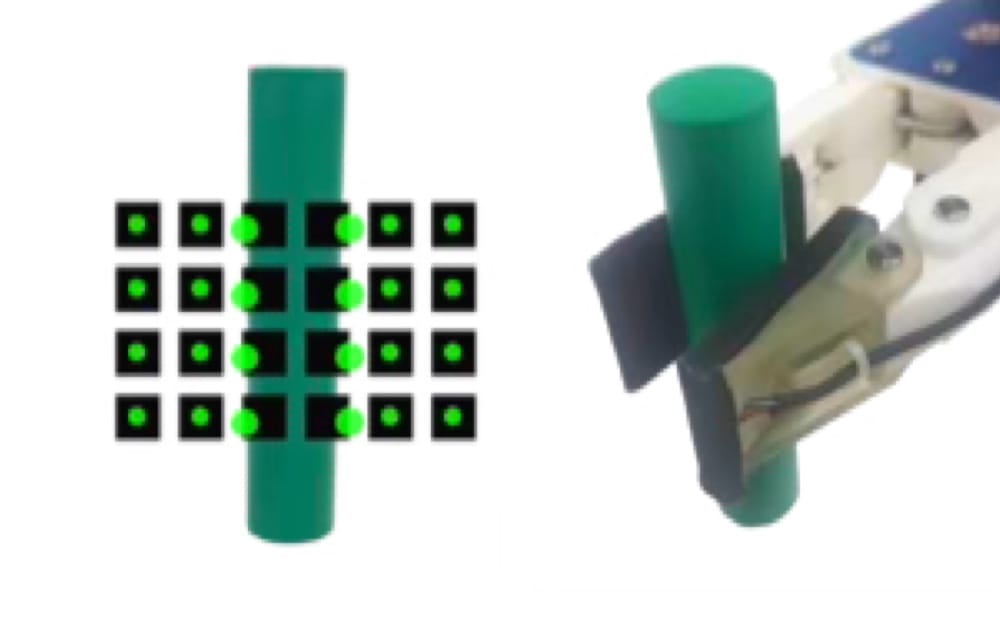
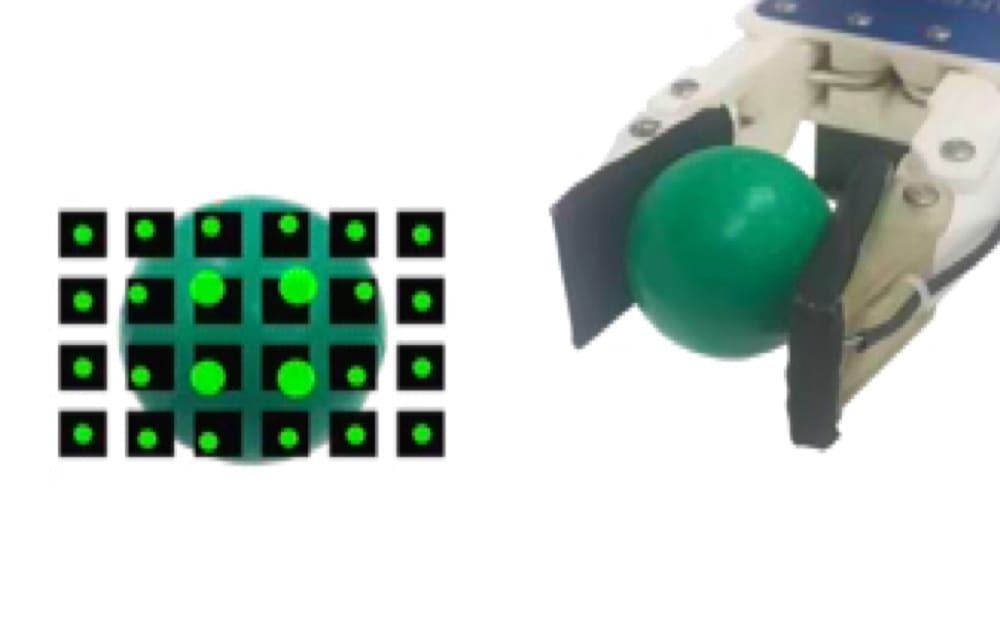
分散型3軸センシング
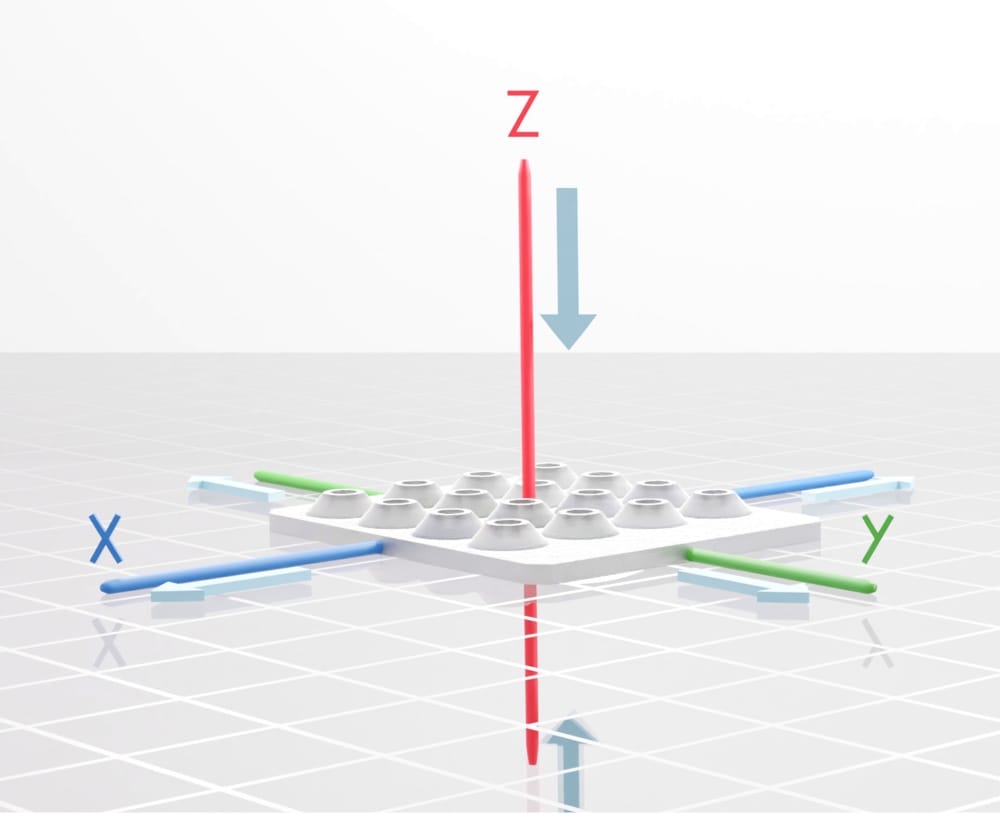
優れた感度:分解能0.1グラム重

ソフト&高耐久
省配線&高速サンプリング: 500 Hz
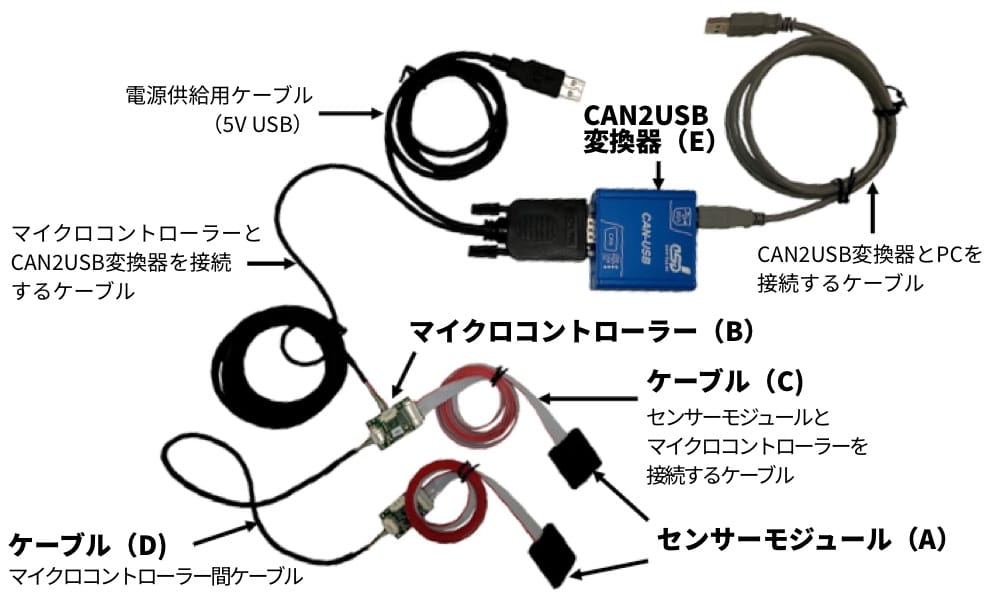
容易なインテグレーションと使用
ニュートン単位での校正
温度および磁気補正
uAiソフトウェアで、触覚データを処理・可視化・解析
uSkinセンサーが取得した触覚データを処理するための、XELAのソフトウェアプラットフォームです。