人の感覚を宿すフィジカルAI
触覚データでオートメーション化を再構築
ソリューションの新たな可能性
XELAの触覚センシング技術が生み出す、多彩な実用例をご紹介します。

小型部品組立
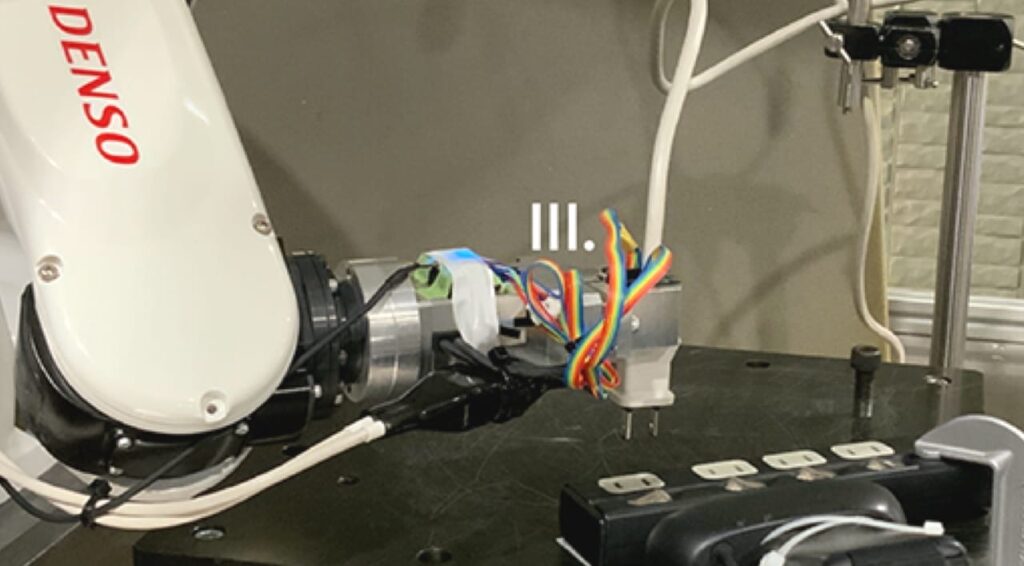
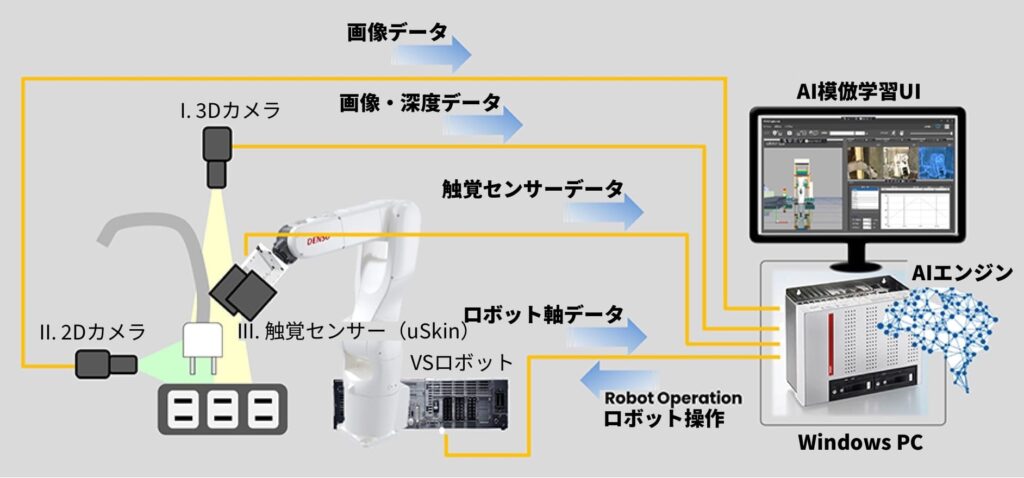
製造工場における組み立ての完全なオートメーション化は、まだ達成されていません。例えば、挿入作業中に生じるわずかなズレが、損傷につながる可能性があります(ケーブルをソケットに挿入する際、メモリーをマザーボードに挿入する際、電気自動車にプラグを差し込む際など)。人間は触覚を使用して、対象物が正しい位置にあるかを検知し、必要に応じて位置を調整します。uSkinとuAiを使用すれば、人間と同じようにロボットもこれらのタスクを解決できます。
ご提供可能な機能
把持された対象物の向きを検知
挿入中に力を測定
ズレを検知し位置を調整
倉庫での部品ピッキング
倉庫における多くのタスクはすでに自動化されていますが、ランダムな向きにある多種多様な物体のピッキングは依然として手作業で行われています。
別のシナリオでは、ロボットは閉じたグリッパーの内部を見ることができないため、コンテナからピックしたネジの数を検知できません。こういった課題を解決するには、触覚データが必要になります。uSkinとuAiにより、以下のことが可能になります。
ご提供可能な機能
重量、硬度、質感といった非視覚的パラメータに基づいて把持力を制御
接触領域と重心に基づいて把持位置を制御し、物体を落とす可能性を予測
スリップを検知し、把持力を調整


デリケートな果物の収穫&選別
果物の物理的特徴および周辺環境に関する詳細情報を提供する触覚センサーは、取扱いに細心の注意を要する果物の収穫自動化に役立ちます。

ギア&アパレル
製品の性能および快適さに関する有益な知見を提供可能な触覚センサーは、ギア&アパレルの最適化において重要な役割を果たします。

ゲーム
3D触覚センシング技術は、高解像度、感度、反応時間の高速化などゲームコントローラーに関する様々な高性能化を実現させます。
選定事例
研究開発
変形する袋の把持および開封
接触データを用いて把持力を制御し、柔らかい素材を適切に扱います。

研究開発
ケーブルプラグの把持および差し込み
接触データにより把持を安定させ、位置合わせを支援します。

50社以上のお客様から信頼されています
XELAの最新の製品カタログで、詳細なモデル仕様、インテグレーション、利用可能なセンサータイプをご覧いただけます
互換性のあるモジュールの確認やカスタマイズ検討の参考として、PDFをダウンロードのうえご参照ください。