2026年5月21日
XELA Robotics、2026年5月・6月に主要3展示会に出展

XELA Roboticsは、下記の展示会にて、最新のセンサーハードウェア、進化を遂げたソフトウェア、そして主要なロボットプラットフォームとの統合拡大など、多岐にわたる最新の触覚センシング技術を公開いたします。ブースでは、これらのアップデートを実機デモにて実演いたします。
- Robotics Summit & Expo 2026:5月27日〜28日|ボストン|ブース番号:616
- ICRA 2026:6月1日〜5日|ウィーン|ブース番号:107
- Automate 2026:6月22日〜25日|シカゴ|ブース番号:1888(South Hall)
※NVIDIAがスポンサーを務める「ヒューマノイド・ロボット・パビリオン」内に出展
新製品の発表と実機デモンストレーション
通常の製品デモに加え、今回は以下の革新的な最新技術を初公開いたします。
- 爪付きロボットフィンガーチップ:XELA Roboticsは、業界初となる、爪部に6軸力センサーを統合したロボットフィンガーチップを開発しました。指腹部には30の3軸力センシングポイントも分散配置されています。ロボットの爪が、指先の触覚センサーを補完することで、カードや鍵といった極めて薄い対象物の器用な掴み取りや、表面からテープを剥がすような複雑な動作までが可能になりました。

早稲田大学 尾形研究室との共同研究により開発。人間の実演から学習したスキルを活用し、高感度なロボット用ネイルがトランプを自律的に掴み上げる様子。 - Universal Manipulation Interface(UMI)への「uSkin」統合:オープンソースの「Universal Manipulation Interface(UMI)」は、人間がボトルの水をコップに注ぐといった日常的な動作を行う様子を観察してデータを収集し、そのスキルをロボットグリッパーへと転送する、人間からロボットへのスキル転送を可能にするAIシステムです。ここに「uSkin」を統合することで、データ収集時に、分散された「力ベクトル」の測定値を付加する機能を実現しました。

フィンガーチップにuSkinセンサーを搭載し、リアルタイムで触覚データを可視化するUMIグリッパー。 - 磁気干渉補正:5月にボストンで開催される「Robotics Summit & Expo」で初公開予定のこの技術は、近傍にある磁石や強磁性体から生じる、極めて複雑な磁気干渉を完全に排除します。工場内での鉄をはじめとする金属の取り扱い、あるいは磁気クリップなどの特殊部品を扱う上で不可欠な技術です。従来の追加オプションでは、強力な小型磁石がセンサーに極めて近接した状況では対応が難しいケースがありましたが、本機能はそれを大きく超える補正性能を実現しています。
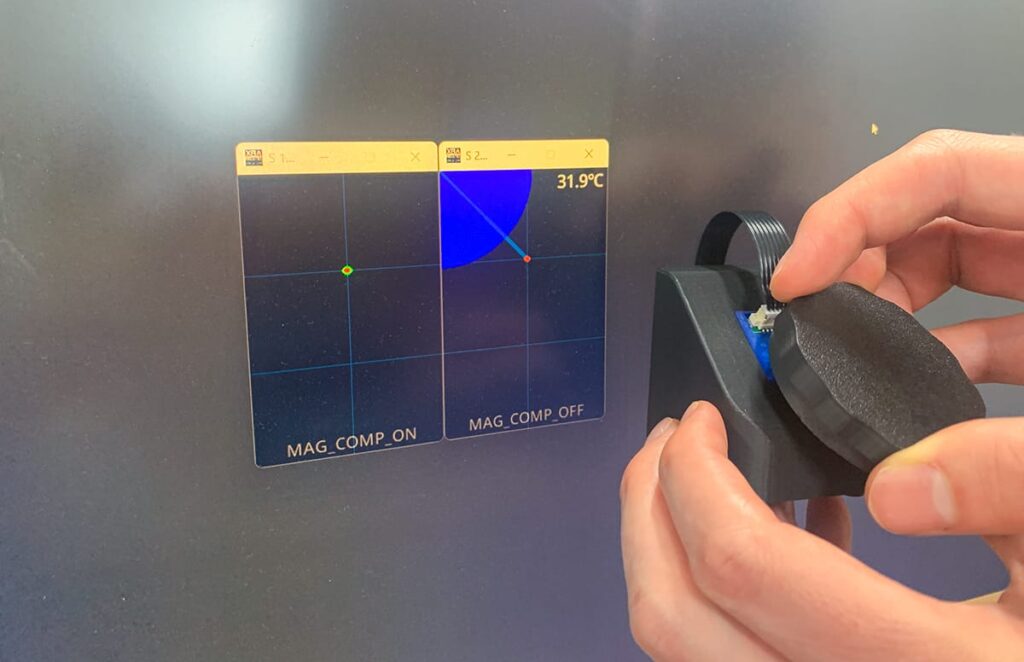
強化されたXELA Roboticsの磁気干渉補正技術。センサーに強力な磁石(吸着力3kg)をほぼ密着させた状態でも、補正あり(左)の測定値には一切影響がない一方、補正なし(右)の測定値には明らかな干渉が現れています。 - 強化された「繊細な把持」能力:uSkin触覚センサーによる、極めて壊れやすい対象物の把持・操作性能がさらに向上しました。対象物を特定するマシンビジョン、ロボットアームの緻密な制御、そして操作性を高めたサードパーティ製GUI(グラフィカルユーザーインターフェース)を融合。これらを集約した最新ソフトウェアにより、高度なロボットアプリケーションの立ち上げや、作業プログラムの開発に要する期間を大幅に短縮できます。弊社ブースでは、紙の折り鶴やウズラの卵を用いた最先端のピック&プレイスデモをご用意。来場者の皆様ご自身でその精度をご体験いただけます。
- 高耐久性モデル:XELAが提供するフィンガーチップカバーを刷新しました。万が一カバーが破損した場合でも、センサーやフィンガーチップ自体を交換することなく、カバーのみを容易に交換可能です。アップデートされた新型カバーは、感度こそ若干低下するものの、より高い弾性と大きな力(高荷重)への耐性を実現しています。
- 重量および硬度の自動検出機能:uSkin触覚センサーを搭載したロボットが対象物を持ち上げるだけで、その「重量」と「硬度」を自動的に判別できるようになりました。
- 「uSPr DS」の改良版:全方位センシングと柔軟性を兼ね備えた「uSPr」。その最新版では、測定時のヒステリシスを低減し、感度を維持したまま耐久性をさらに強化しました。ヒステリシスを最小限に抑えた全方位センシングと高い耐久性は、バラ積みピッキングなどの用途において、周囲の対象物への破損を防ぐ上で大きな効果を発揮します。
- 高速「CAN FD」通信への対応:XELAのセンサーは、最新の高速通信プロトコル「CAN FD(Controller Area Network Flexible Data-Rate)」による出力に対応。データ転送速度の向上(最大8 Mbps)とペイロード容量の拡大(従来のCANの8バイト制限から最大64バイトへ拡張)により、同一データライン上により多くのセンサーモジュールを配置しても、データ取得頻度を低下させることなく運用可能です。さらに、XELA独自のイベントベース通信と組み合わせることで、多数のセンシングポイントが同時にアクティブになった場合でも、極めて安定したパフォーマンスを維持。人間型ロボットのハンドなど、限られたスペースに多数のセンサーを組み込む上で、省配線化は極めて重要な要素となります。
- マイクロコントローラーの刷新:改良されたマイクロコントローラーにより、さらなる高周波化を実現。一例として、Robotiq社製「Hand-E」向けの「uSPr HE35」は、500 Hzでの動作が可能になりました。「Hand-E」用フィンガーチップはわずか6.6mmという薄型でありながら、それぞれのフィンガーチップに60の測定点を備え、最表層の交換も容易な設計となっています。
ハードウェアを選ばない「ハードウェアアグノスティック」な統合
XELAの「uSkin」テクノロジーは、搭載するハードウェアを選びません。幅広いロボットハンドやグリッパーへの柔軟な統合が可能です。展示会ではその実例として、Tesollo社およびAllegro社のロボットハンド、ならびにRobotiq社の「Hand-E」および「2F」グリッパーを用いた実機デモを実演いたします。
単体のパッチセンサーや独立型のフィンガーチップから、ロボットアーム全体を連動させたデモンストレーションにいたるまで、XELAの技術がいかに容易に既存のロボットシステムへ組み込めるか。その圧倒的な親和性を、ぜひ会場で直接ご体感ください。
この記事をシェア